










March 2014. Progress has been a bit slow this month, at least partly as a result of getting Brighton Road ready for Scalefour North in April. However, progress has been made on scenic work and on the signal box.
For the signal box, I’ve used my usual technique of producing a scale drawing on CAD (I use Corel Draw). CAD is far more accurate than a hand-drawn diagram, and can be reprinted as many times as I need for different purposes. For complex shapes such as the upper half of the box (all windows) I make each wall separately, taped onto the drawing, and using the drawing itself as the guideline for cutting out window recesses etc.
I’ve experimented in the past with window frames cut from paper, as an alternative to etched brass. This has the advantage that windows of any design can be replicated quickly, although cutting them out can be problematic. I draw them as part of my overall drawing of the building, and then print about twice as many copies as I need for the final building, using heavy grade photo paper. I then cut out the frames, choosing the best, until I am satisfied that I have enough good quality ones for the task in hand, plus a few spares. (Note that this technique has been superseded with the use of a ‘Silhouette’ paper cutter).
The next stage is to paint the frames, before gluing to the acrylic sheet, and cutting to size ready to fit.
April 2014. A large part of April has been taken up with getting Brighton Road ready for Scalefour North in Wakefield. We have decided that this will regrettably be the layout’s final show before being taken apart. The layout is basically too big to be practicable - it’s too big for us to store, too big for us to keep erected and maintained, and too big for most shows to accommodate. It’s sad to see the end of a layout, but all things must pass, and quite a few bits and pieces will be retrieved and re-used on other layouts - principally Plumpton.
As Plumpton’s first outing gets closer, we’re turning our thoughts to transportation and presentational things. The lighting from Brighton Road is immediately reusable with only minor modifications - Plumpton is only 600mm wide compared with 900 for Brighton Road. All we have to do is cut 300mm off the front of each of the lighting frames - job done.
Brighton Road’s trestles can also be used - most of them can be left at 900mm wide to support the layout and the display boards which will fit onto the front of the layout. Two need to be cut down to 650mm to support the fiddle yards, and two more to support the lever frame/control panel. Another easy job done.
Brighton Road (and Pulborough and West Chiltington) travelled in boxes to exhibitions, and this has made transport easier in terms of loading the van, and also for protecting the layout in transit. The Brighton Road boxes are too big for Plumpton Green, but a few days work sees them reduced in size (and weight!).
I like to see well-presented layouts at exhibitions, with some explanatory text about the model and its background. For Plumpton we have decided to make some display panels which will fit along the front of the layout, either side of the control panel. These will display text plus a few photographs.
May 2014. The end of our two year programme to get the layout to an exhibitable state is fast approaching, so we’ve had to make a list of things still to be done, essential or desirable, before the layout’s first outing - a rather daunting list. However, I think it’s all do-able.
As May begins, we have no fiddle yards - a rather essential component! We’ve been contemplating the design for some time, trying to decide between various compromises. For the layout to be set up permanently in the garage, the fiddle yard can only be 1200mm long, but the cassettes that were made for Brighton Road are 1500mm long. These have proved to be a bit too long to handle comfortably and safely, and will probably be shortened at some point in the future, but a 1200mm fiddle yard implies cassettes of about 1000mm long - too short I think for exhibition.
The solution we have decided to adopt is to make two fiddle yards at 1200mm long, which are a convenient size to make from a sheet of ply 2400 by 1200mm, and also a convenient size to handle. One of these can be used in the garage with the layout permanently erected at home. We can make a few short cassettes for this.
For exhibition purposes we have also made two 600mm long extensions which simply bolt on to the main fiddle yards, giving two sections 1800mm long - plenty of room for the long cassettes. Eventually we may shorten the Brighton Road cassettes to 1350mm, which will make them easier to store, transport and handle, but still be long enough for some of our longer trains.
Whilst I’ve got the woodworking machinery out I’ve decided to make the display boards - not part of the original plan, but only a few hours work with the band saw.
Having taking apart a significant amount of Brighton Road, I now have rather a lot of spare Tortoise motors. The ground signals on Plumpton are all driven by Fulgarex motors, but these are proving rather noisy to put it mildly. We’ve decided to bite the bullet and replace all ten with Tortoises - a few more hours work that we hadn’t planned........
As we near the end of May, we still don’t have any running signals on the layout - an essential feature to fit in with the interlocked lever frame. We have two signals from Brighton Road which can be reused - one is a short calling on arm, which can be fitted immediately, and the other is a taller signal which needs a new arm. The final signal will be very tall, and needs to be built from scratch.
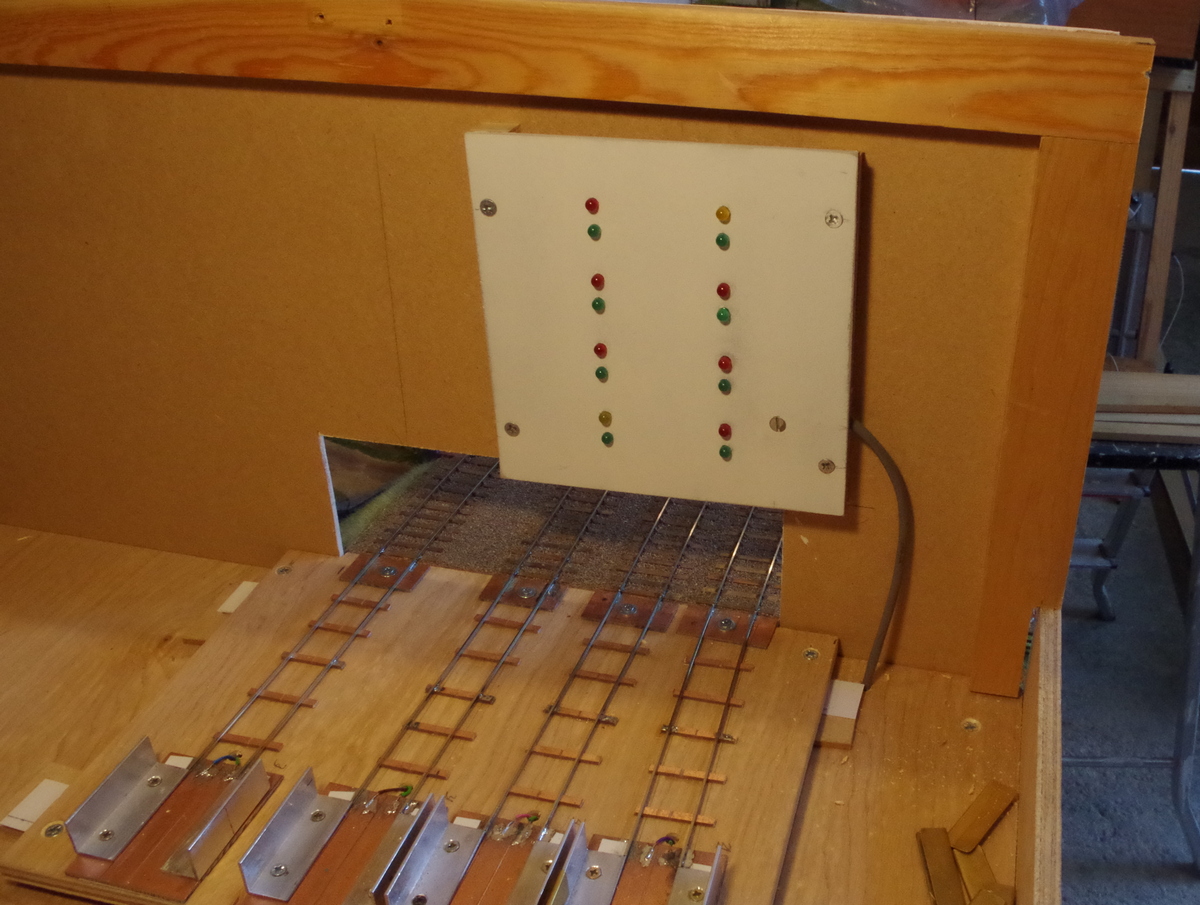
May 26th - One signal fitted and wired up, with the second and third signals substantially complete. The lever frame has levers for all eight running signals (distant, home, platform starter, advanced starter in each direction), and the plan is to have repeater indications in the fiddle yards (using LEDs) so that train drivers can see all the signals, even though only the two platform starters are actually on the layout. We’re hoping that this will make operation much easier, particularly when we have the block instruments working as well.
 I hadn’t intended to make these repeaters, but in a spare moment I put together a little test piece to see how things might work, and an hour later I have one finished panel -
I hadn’t intended to make these repeaters, but in a spare moment I put together a little test piece to see how things might work, and an hour later I have one finished panel - just needs wiring to the fiddle yard. The photo shows the ‘London’ fiddle yard with the up and down lines on the right and second from right respectively. The LEDs above show distant, home, platform starter and advanced starter (bottom up for the down line, and top down for the up line).
 May 27th -
May 27th - Two more signals finished, installed and wired up, and all the signals on the two central boards tested under power.
 It’s getting a bit crowded under parts of the layout (photo right)-
It’s getting a bit crowded under parts of the layout (photo right)- Tortoise motors for two turnouts, one ground signal, and (horizontally) for the two running signals in the photo (left)
Still a few things to do - mainly finish the second fiddle yard.....
May 29th - A bit of work on the second fiddle yard. The wood-work is finished, and a start has been made on preparing to lay the four sections of transition track between the layout and the cassettes.
June 2nd - Track laid, wired up and tested on the second fiddle yard. We now have all the components finished in our aim to get Plumpton Green to an exhibitable state within two years. The layout has been tested as it has been built, but it hasn’t yet been set up in its entirety with either of the fiddle yards, so the next stage is to set it up and give it a full test with full length trains - something to be done during the forthcoming week.
So what have we achieved in two years? Quite a lot I think:
- research, including the history of the line, maps, plans and photographs, both current day and historic
- on-site measurement surveys.
- track-work designed, drawn on Templot, built, painted, laid, ballasted and wired up
- point motors for turnouts installed and wired
- buffer stops built and fitted
- lever frame and interlocking researched, designed, built, wired up and tested.
- base-boards and fiddle yards built
- display boards built
- stream and culvert completed, accommodation crossing completed
- station buildings and signal box substantially complete
- platforms built and fitted
- footbridge built
- basic landform and scenic work complete - embankments, fields, grass, fencing, hedges, and a few trees
- running signals and ground signals built and installed
- lighting, trestles and transport boxes modified from Brighton Road
However, still a lot to do - mainly finishing the buildings and adding scenic detail, not to mention the inevitable adjustments to trackwork to make sure it runs well.............
June 4th - The layout is now fully set up for the first time in the garage - back-scenes fitted, lights fitted, and all wired up. Time for some extensive testing..........
After an hour or so of testing, we have one broken wire, and a dead section of rail, one signal mechanism which is a bit flakey, one signal which doesn’t work at all, and one possible under-gauge section of track, plus a broken tie-bar. Not too bad. Fixed the broken wire, and the flakey signal mechanism and worked out why the other signal doesn’t work - something to fix tomorrow.
For the signal box, I’ve used my usual technique of producing a scale drawing on CAD (I use Corel Draw). CAD is far more accurate than a hand-
I’ve experimented in the past with window frames cut from paper, as an alternative to etched brass. This has the advantage that windows of any design can be replicated quickly, although cutting them out can be problematic. I draw them as part of my overall drawing of the building, and then print about twice as many copies as I need for the final building, using heavy grade photo paper. I then cut out the frames, choosing the best, until I am satisfied that I have enough good quality ones for the task in hand, plus a few spares. (Note that this technique has been superseded with the use of a ‘Silhouette’ paper cutter).
The next stage is to paint the frames, before gluing to the acrylic sheet, and cutting to size ready to fit.
April 2014. A large part of April has been taken up with getting Brighton Road ready for Scalefour North in Wakefield. We have decided that this will regrettably be the layout’s final show before being taken apart. The layout is basically too big to be practicable -
As Plumpton’s first outing gets closer, we’re turning our thoughts to transportation and presentational things. The lighting from Brighton Road is immediately reusable with only minor modifications -
Brighton Road’s trestles can also be used -
Brighton Road (and Pulborough and West Chiltington) travelled in boxes to exhibitions, and this has made transport easier in terms of loading the van, and also for protecting the layout in transit. The Brighton Road boxes are too big for Plumpton Green, but a few days work sees them reduced in size (and weight!).
I like to see well-
May 2014. The end of our two year programme to get the layout to an exhibitable state is fast approaching, so we’ve had to make a list of things still to be done, essential or desirable, before the layout’s first outing -
As May begins, we have no fiddle yards -
The solution we have decided to adopt is to make two fiddle yards at 1200mm long, which are a convenient size to make from a sheet of ply 2400 by 1200mm, and also a convenient size to handle. One of these can be used in the garage with the layout permanently erected at home. We can make a few short cassettes for this.
For exhibition purposes we have also made two 600mm long extensions which simply bolt on to the main fiddle yards, giving two sections 1800mm long -
Whilst I’ve got the woodworking machinery out I’ve decided to make the display boards -
Having taking apart a significant amount of Brighton Road, I now have rather a lot of spare Tortoise motors. The ground signals on Plumpton are all driven by Fulgarex motors, but these are proving rather noisy to put it mildly. We’ve decided to bite the bullet and replace all ten with Tortoises -
As we near the end of May, we still don’t have any running signals on the layout -
May 26th -
 I hadn’t intended to make these repeaters, but in a spare moment I put together a little test piece to see how things might work, and an hour later I have one finished panel -
I hadn’t intended to make these repeaters, but in a spare moment I put together a little test piece to see how things might work, and an hour later I have one finished panel - May 27th -
May 27th - It’s getting a bit crowded under parts of the layout (photo right)-
It’s getting a bit crowded under parts of the layout (photo right)-Still a few things to do -
May 29th -
June 2nd -
So what have we achieved in two years? Quite a lot I think:
-
However, still a lot to do -
June 4th -
After an hour or so of testing, we have one broken wire, and a dead section of rail, one signal mechanism which is a bit flakey, one signal which doesn’t work at all, and one possible under-